相关文章

c++基础学习第五天半(类和对象)
c基础学习第五天半(类和对象) 文章目录 2.3、C对象模型和this指针2.3.1、成员变量和成员函数分开存储2.3.2 、this指针概念2.3.3、 空指针访问成员函数2.3.4、 const修饰成员函数 2.4 、友元2.4.1、 全局函数做友元2.4.2、 类做友元2.4.3、成员函数做友元…
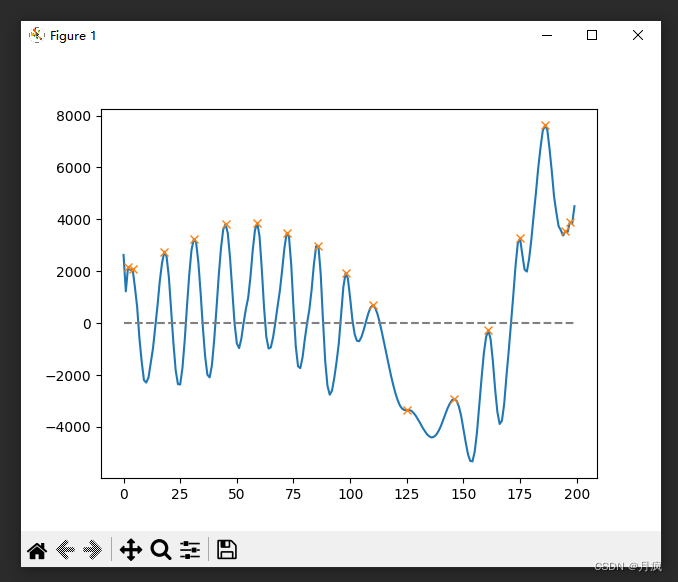
EMD关于信号的重建,心率提取
关于EMD的俩个假设: IMF 有两个假设条件: 在整个数据段内,极值点的个数和过零点的个数必须相等或相差最多不能超过一 个;在任意时刻,由局部极大值点形成的上包络线和由局部极小值点形成的下包络线 的平均值为零&#x…

java多数据源几种实现方式以及demo
提示:多数据源实现方式、多数据源的使用场景。AbstractRoutingDataSource、DynamicDataSource框架、mybatisplus的Intercepter插件、java中多数据源的几种实现方式、mybatisPlus的插件实现多数据源 文章目录 前言一、多数据源的几种实现方式二、使用场景三、核心原理…
Taskflow:优先级任务(Prioritized Tasking)
Taskflow 支持给一个Task设置优先级,有助于在特定场景下的优化;总共有三种优先级:tf::TaskPriority::HIGH, tf::TaskPriority::NORMAL, 和 tf::TaskPriority::LOW。
对于一个并行Task集合(一组零依赖的Task,可并行执行…
滑动窗口算法详解及应用示例
引言: 滑动窗口算法是一种用于解决数组/字符串问题的有效技巧。它可以用来解决一系列问题,例如求解子数组/子字符串的最大值、最小值、平均值、和、特定条件下的个数等。在本篇博客中,我们将详细介绍滑动窗口算法的原理,并通过几个…
torch中的nonzero() 方法
其实这里的torch的nonzero() 和numpy的nonzero() 是一样的使用方法。
就是返回所有非0元素的index。一般用于CV中mask操作 首先定义一个5*4的tensor,其中为0的元素个数为3个,不为0的个数为17个
import torchXtorch.tensor([[1, 2, 0, 4],[5, 6, 7, 8…
关系型数据库和非关系型数据库介绍
好的,关系型数据库和非关系型数据库是两种不同类型的数据库,它们在数据存储、查询方式、性能、可扩展性等方面存在差异。以下是一些常见的关系型数据库和非关系型数据库的示例、特点和具体使用场景: 关系型数据库 1. MySQL:MySQL …

SQL109 纠错4(组合查询,order by..)
SELECT cust_name, cust_contact, cust_email
FROM Customers
WHERE cust_state MI
UNION
SELECT cust_name, cust_contact, cust_email
FROM Customers
WHERE cust_state IL
ORDER BY cust_name;order by子句,必须位于最后一条select语句之后